There’s something to be said for the feel of controls. Whether it’s the satisfying snap of a high-quality switch or the buttery touch of the pots on an expensive amplifier, the tactile experience of the controls you interact with says a lot about a device.
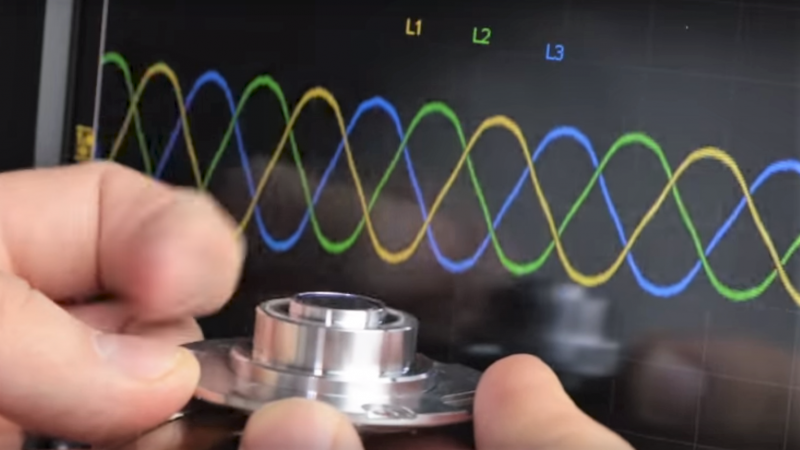
[GreatScott!] knows this, and rather than put up with the bump and grind of a cheap rotary encoder, he decided to find an alternative. He ended up exploring hard drive motors as encoders, and while the results aren’t exactly high resolution, he may be onto something. Starting with a teardown of some old HDDs — save those magnets! — [Scott!] found that the motors fell into either the four-lead or three-lead categories. Knowing that HDD motors are brushless DC motors, he reasoned that the four-lead motors had their three windings in Wye configuration with the neutral point brought out to an external connection. A little oscilloscope work showed the expected three-phase output when the motor hub was turned, with the leading and lagging phases changing as the direction of rotation was switched. Hooked to an Arduino, the motor made a workable encoder, later improved by sending each phase through a comparator and using digital inputs rather than using the Nano’s DACs.
It looks like [GreatScott!]’s current setup only responds to a full rotation of the makeshift encoder, but we’d bet resolution could be improved. Perhaps this previous post on turning BLDC motors into encoders will help.

Since when does a nano have a DAC?
he means ADC
The other useful thing about the op-amps is if a fidget spinner champion walks up to your device, they can’t induce 100 volts into your nano! :)
Nice project!
But the Arduino seems having low response time.
GreatScott!’s setup has a few flaws, though – the opamps he is using are low voltage one and he has no clamping on the input signals – spin the motor fast enough and the generated EMF voltage will likely blow them.
The second problem is that this setup will actually respond only if you turn the motor fast enough – the voltage generated depends on how fast the rotor turns. So probably not that great for precise control without some modification.